Lenze в Україні
office@sv-altera.com
Часто задаваемые вопросы
Серия 8400 Inverter Drives
Особенности реализации функции Winder в преобразователях частоты 8400 Vector Highline v.11.0.
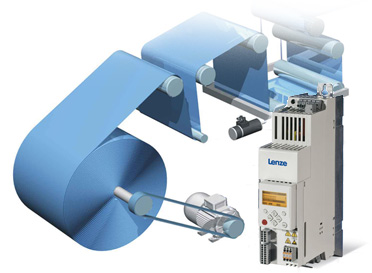
Большинство ленточных материалов хранятся в катушках, затем разматываются для обработки и снова наматываются обратно на катушку в конце процесса обработки. Между размотчиком и намотчиком находятся синхронизированные приводы для обработки этого материала.
Типовые применения электроприводов намотки включают:
- намоточные устройства для тканей, пленок, бумаги и листового металла;
- печатные машины;
- упаковочные машины;
- машины непрерывной обработки и процессов очистки.
Наматываемый материал закатывается или раскатывается с постоянной круговой (линейной) скоростью, которая устанавливается в соответствии с направлением вращения. Растягивающее усилие, действующее на материал, поддерживается постоянным или изменяется в соответствии с диаметром. Для этого используются «дансер» или контроль натяжения. Поскольку радиус постоянно изменяется в течение намотки и размотки, привод должен обеспечивать широкий диапазон задания скорости и момента. В течение размотки привод всегда работает в режиме генератора, поскольку он замедляет материал и возвращает энергию в течение этого процесса.
Большинство намоточных механизмов с определенными силами натяжения материала проектируются для стационарной работы. Динамика привода ограничивается и используется для замедления катушки в аварийных режимах. В то же время в намотчиках частот используется ослабление поля, поскольку при повышении скорости при малых диаметрах требуемый момент незначителен.
Использующиеся в промышленности преобразователи частоты и сервопреобразователи Lenze отличаются тем, что позволяют решать сложные приводные задачи без дополнительных логических устройств и программируемых логических контроллеров. Это свойство обеспечивается за счет наличия большого количества функциональных блоков, а также возможности включения логических связей между ними.
Одной из новинок в преобразователях частоты 8400 Vector Highline v.11.0 стало появление в функциональных блоках преобразователя модуля L_CalcDiameter_1, предназначенного для пересчета диаметра рулона наматываемого или сматываемого материала, в соответствии с линейной скоростью намотки и скоростью вращения катушки.
Такое дополнение позволяет использовать 8400 Vector Highline в системах намотки бумаги в большие рулоны, где сила натяжения должна изменяться в широких пределах для исключения эффекта телескопа. Этот эффект заключается в том, что при равномерном натяжении для больших рулонов намотка невозможна, так как статическое трение между соседними слоями приводит к тому, что внутренние слои выдавливаются наружу.
Поэтому при увеличении диаметра сила натяжения должна уменьшаться, начиная с определенного диаметра пропорционально диаметру рулона.
Функциональный блок L_CalcDiameter_1 обрабатывает сигналы с датчика линейной скорости пленки, например линейного энкодера Kuebler, датчика скорости вращения вала двигателя (вычислителя скорости вращения), а также задатчика начального диаметра барабана. Общий вид функционального блока представлен на рисунке:
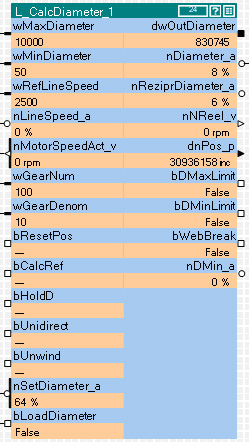
Пользователем задается максимальный и минимальный диаметр барабана, максимальная линейная скорость пленки, передаточное число редуктора. При этом функциональный блок L_CalcDiameter_1 высчитывает текущий диаметр катушки, количество намотанного материала на катушку, скорость вращения катушки, а также сигнализирует о достижении максимального и минимального диаметров барабана.
Значение n_Diameter_a, указывающее в процентном отношении количество намотанного материала на катушку, подается на блок коррекции задания по скорости для двигателя.
Работа с вышеуказанным функциональным модулем возможна только в редакторе функциональных блоков программного обеспечения L-force Engineer Highlevel, подключение к которому производится с помощью адаптера E94AZCUS. Используя L_CalcDiameter_1, а также другие функциональные модули возможна реализация следующих функций, обязательных для электропривода намоточного механизма:
- подсчет диаметра рулона и толщины материала;
- ПИД- регулятор контроля натяжения;
- стоп-контроль;
- определение характеристик трения и момента инерции;
- компенсация трения.
Еще одной особенностью 8400 Vector является возможность объединения нескольких преобразователей через звено постоянного тока. При этом производится обмен тормозной и двигательной энергией и мощность, генерируемая при размотке, может быть использована намотчиком либо синхронизированными электроприводами. В качестве других вариантов могут быть использованы тормозные устройства либо модули рекуперации.
Таким образом, применение 8400 Vector Highline v.11.0 позволяет решать задачи намотки, аналогичные по сложности с задачами, в которых раньше использовались преобразователи 9300 Vector, при этом стоимость оборудования для нового приводного решения будет значительно ниже.
Управление плавным пуском и остановом двигателя при использовании преобразователя частоты 8400 Vector Highline
В ряде случаев при управлении электромеханическими системами необходимо не только плавно разгонять, но и останавливать вал двигателя. Особенно это актуально в случае инерционных нагрузок, например, вентиляторов большой мощности.
Использовать размыкание сигнала RFR для останова не рекомендуется, так как при этом происходит аппаратное отключение сигналов управления ключей инвертора и при большой скорости вращения выходного вала возможен переход в генераторный режим. При этом возникает перенапряжение в звене постоянного тока, что может привести к отказу преобразователя.
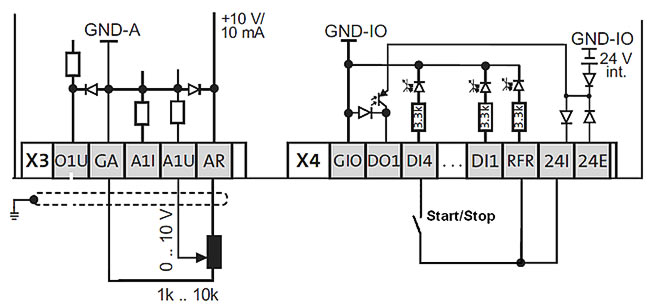
Следовательно, для плавного останова необходимо использовать один из дискретных входов, при этом логический сигнал на клемме RFR должен присутствовать постоянно.
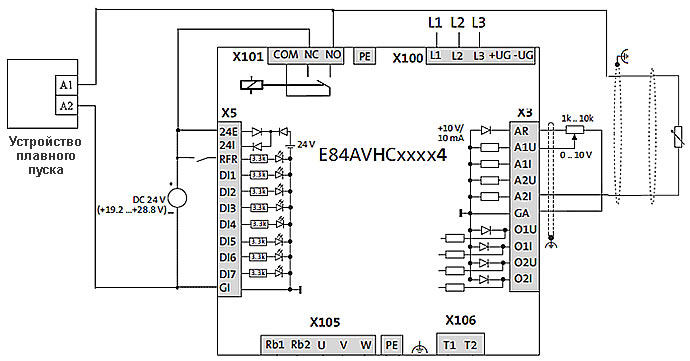
Схема подключения управляющих сигналов, в этом случае, следующая (для примера взят вход DI4):
Помимо этого необходимо осуществить изменение конфигурирование преобразователя:
| Код | Описание | Значение | Примечания |
|---|---|---|---|
| C0114 | Инверсия дискретных входов | 8 | Инвертируется вход DI4 |
| С0142 | Реакция ПЧ на включение питания при логическом сигнале на RFR | 24 | Установить любое четное число, то есть выключить первый бит (невозможности запуска при подаче питания) |
| С0701/6 | Включение функции спадания задания в ноль с плавным замедлением | 16003 | Включение функции с помощью дискретного входа DI4 |
| С0701/8 | Реверс преобразователя | 0 | Отключено |
После окончания ввода параметров установите С0002/11=1 (сохранение параметров в энергонезависимой памяти преобразователя).
При использовании программного обеспечения L-force Engineer Statelevel (бесплатная версия) и модуля связи с компьютером программирование необходимых параметров осуществляется следующим образом. В поле дискретного входа DI4 устанавливаем инверсию сигнала.
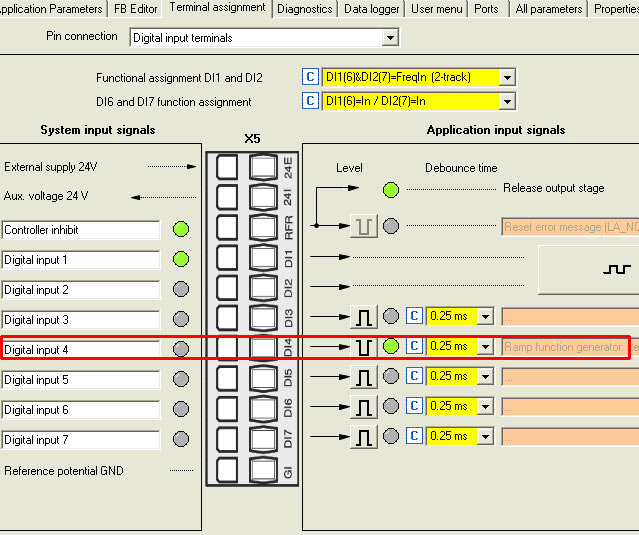
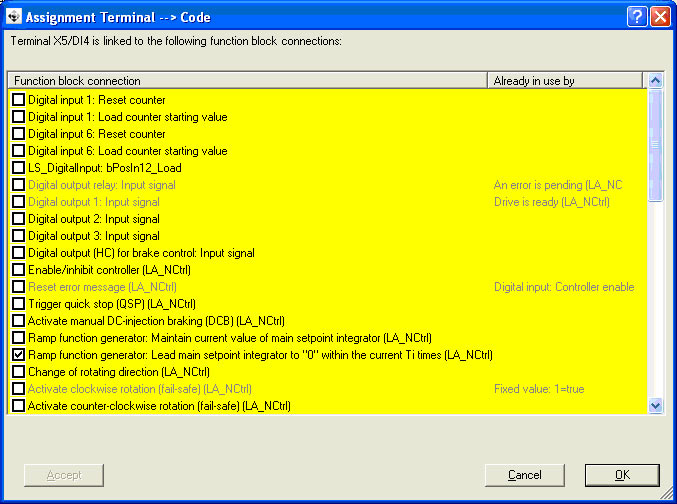
Далее выбираем в функции дискретного входа DI4 значение Ramp function generator: Lead main setpoint integrator to “0”, при этом предыдущую функцию для DI4 рекомендуется убрать.
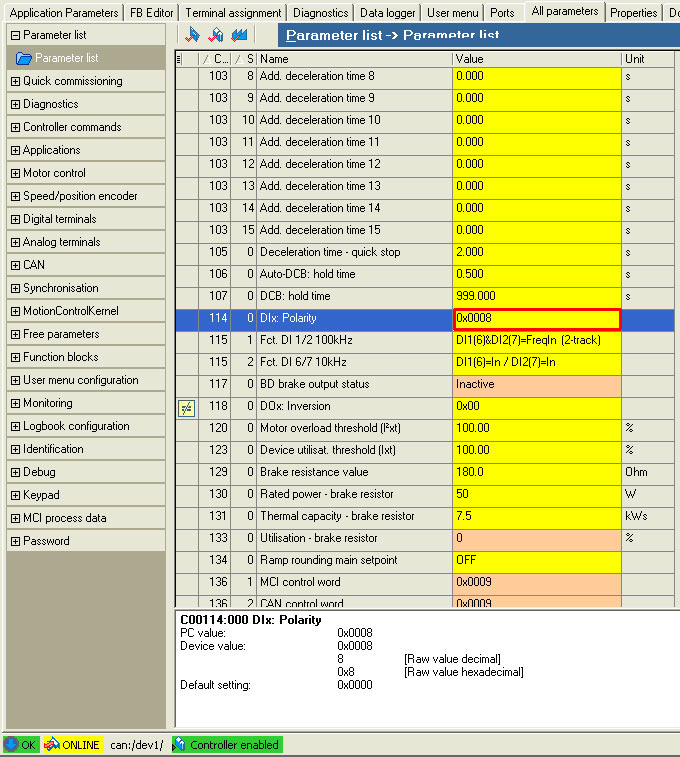
В параметре С0114 устанавливаем инверсию четвертого входа DI4.
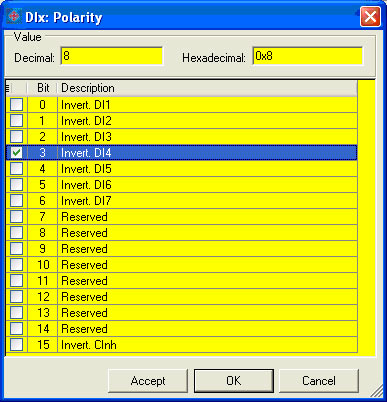
При этом в параметре инверсий дискретного сигнала будет установлено число 8.
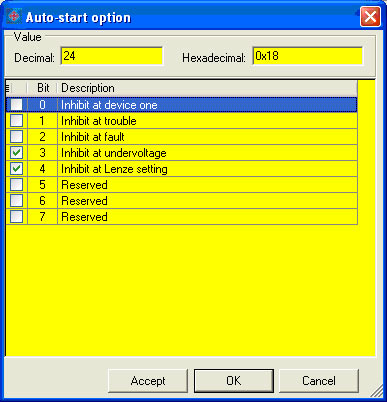
В С0142 параметре отключаем запрет запуска преобразователя частоты при подаче питания и наличии логического сигнала на RFR.
После окончания ввода параметров установите С0002/11=1 (сохранение параметров в энергонезависимой памяти преобразователя).
Управление преобразователем частоты 8400 Vector с помощью двухканального частотного входа (энкодерный выход)
Для настройки управления скоростью электродвигателя преобразователем частоты 8400 Inverter Drives от частотного входа с пульта программирования необходимо установить следующие значения для параметров:
| Код | Параметры | Замечания | ||
|---|---|---|---|---|
| № | Назначение | Величина | ||
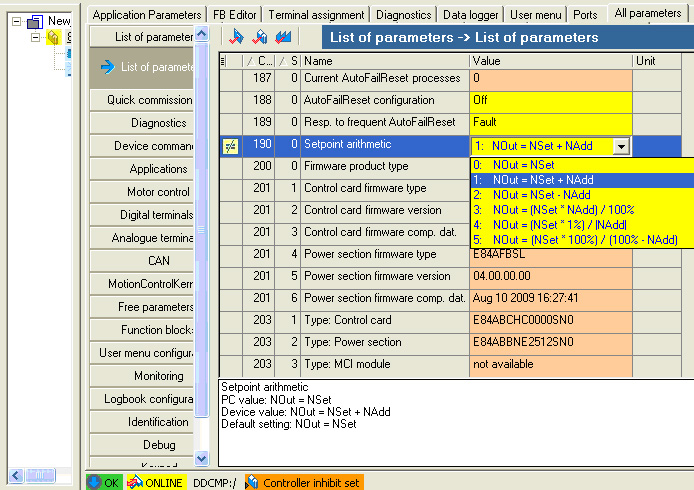
| C190/0 | Формула вычисления уставки | 1 | Nout=Nset + Nadd | Значение основной уставки Nset суммируется со значением дополнительной уставки с частотного входа Nadd |
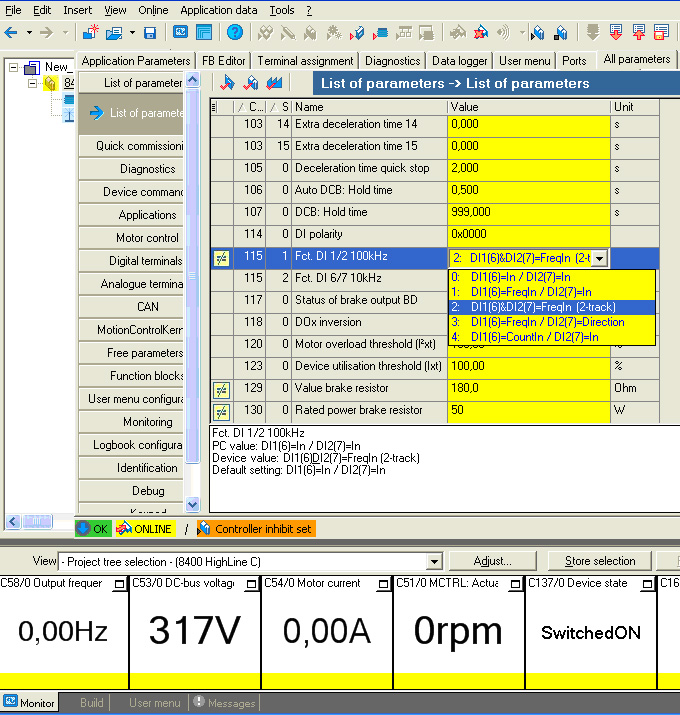
| С115/1 | Функция работы дискретных входов 1 и 2 | 2 | DI1&DI2=NfreqIN1(2-track) | Управление от энкодера с входами А и В, сдвинутыми на 90 градусов |
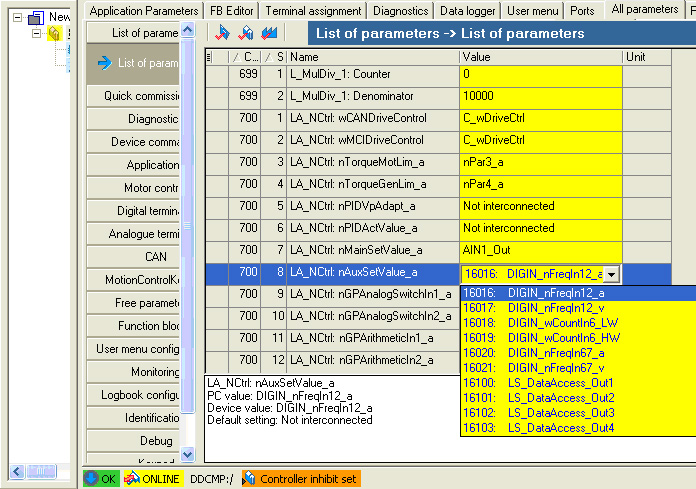
| С700/8 | Значение дополнительной уставки | 16016 | DIGIN_NfreqIN1 | Подается значение, с частотного входа. |
Настройка управления от частотного входа при использовании программного обеспечения L-force Engineer.
Переключаем дискретные входы DI1, DI2 в режим двухканального частотного входа.
Определяем задание по скорости как сумму основной и дополнительной уставок:
Выбираем в качестве дополнительной уставки по скорости сигнал по частоте, приходящий на дискретные входы DI1, DI2.
Примечание!!! При такой конфигурации сигнал по частоте суммируется с аналоговым сигналом задания. Для устранения возможной ошибки смещения по аналоговому входу целесообразно поставить перемычку между A1U и GA.
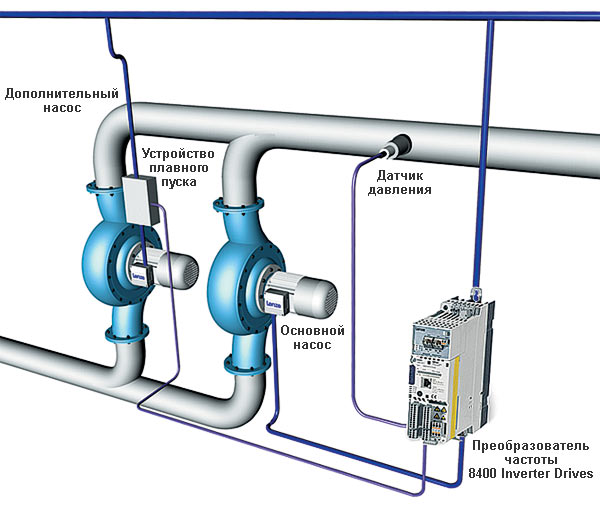
Поддержание давления с помощью регулируемого основного насоса и нерегулируемого дополнительного
Для решения данной задачи необходимо следующее оборудование:
- преобразователь частоты серии 8400 Vector Highline;
- устройство плавного пуска;
- датчик давления;
- устройство связи преобразователя частоты с ПК (например Diagnostic Adapter).
Производительность основного насоса регулируется преобразователем частоты серии 8400 Vector Highline. ПЧ имеет обратную связь по давлению, которая организована с помощью датчика давления установленного после насосов. Дополнительный насос плавно включается и отключается через устройство плавного пуска.
Постоянно работает основной насос. При увеличении расхода увеличивается скорость работы основного насоса. При достижении заданного порога частоты (N=0,95Nном) в течение заданного времени происходит ввод в работу дополнительного насоса. При этом частота основного снижается до N=0,45Nном (торможение), и затем включается нерегулируемый дополнительный насос. Регулирование давления производится с помощью регулирования скорости вращения основного насоса.
Если при работе основного и дополнительного насосов частота на основном регулируемом насосе снижается ниже заданного порога N=0,45Nном, то дополнительный насос отключается. Регулирование давления производится только управлением основным насосом.
Конфигурирование преобразователя осуществляется путем «прошивки» в преобразователь готовой конфигурации, созданной специалистами компании «СВ Альтера», с помощью устройства связи с ПК. При этом запись «прошивки» возможна с помощью бесплатной версии программного обеспечения L-force Engineer Statelevel. После записи прошивки и сохранения измененных параметров с помощью установки кода С0002/11=1 (сохранить настройки в память ПЧ), пользователь может самостоятельно настроить основные параметры конфигурации системы, приведенные ниже.
| Код | Описание | Значение | Примечание |
|---|---|---|---|
| С34/1 | Тип задатчика, подключаемого к аналоговому входу №1 | 0 | Задатчик 0-10В |
| С34/2 | Тип датчика, подключаемого к аналоговому входу №2 | 2 | Датчик 4..20мА |
| С222 | Коэффициент усиления ПИД - регулятора | 1 | Адаптировать к переходному процессу, исходя из требований к перерегулированию и быстродействию |
| C223 | Постоянная времени интегрирования ПИД - регулятора | 400 | |
| C224 | Постоянная времени дифференцирования ПИД - регулятора | 0 | |
| C472/1 | Максимальное значение скорости, при которой включается дополнительный насос | Значение задается в процентах | |
| C472/2 | Значение частоты, до которой замедляется преобразователь для исключения гидроудара в сети | Значение задается в процентах, не может быть ниже 5% | |
| C472/3 | Значение частоты, при котором происходит переключение с двух работающих насосов на один основной | Значение задается в процентах | |
| C721/1 | Время задержки включения второго насоса по достижению максимальной скорости | 30c | Настраивается пользователем в соответствии с условиями работы системы |
Схема подключения имеет вид:
 Файлы конфигурации преобразователя 8400 на задачу управления двумя насосами для L-Force Engineer [116пїЅпїЅ]
Файлы конфигурации преобразователя 8400 на задачу управления двумя насосами для L-Force Engineer [116пїЅпїЅ]
Реализация процедуры автонастройки преобразователя частоты 8400 Vector на двигатель
Для осуществления процедуры автонастройки преобразователя на двигатель для векторного режима вводим параметры двигателя.
- С0081/0 - мощность двигателя
- С0087/0 - номинальная скорость вращения двигателя
- С0088/0 - номинальный ток двигателя
- С0089/0 - номинальная частота двигателя
- С0090/0 - номинальное напряжение двигателя
- С0091/0 - номинальный cosFi двигателя
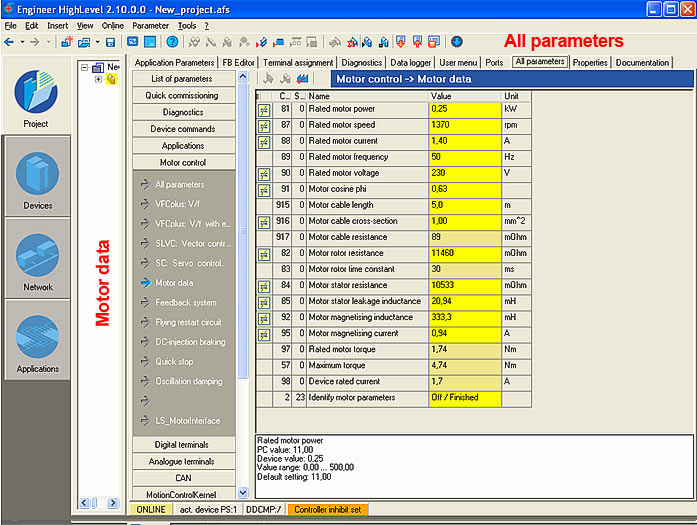
При использовании программного обеспечения L-Force Engineer выставляем параметры двигателя во вкладке "All parameters" пункта "Motor data" папки "Motor control".
После ввода параметров запускаем процедуру автонастройки. При работе с пультом управления EZAEBK1001 устанавливаем:
- С0002/23=1; (Identify motor parameters)
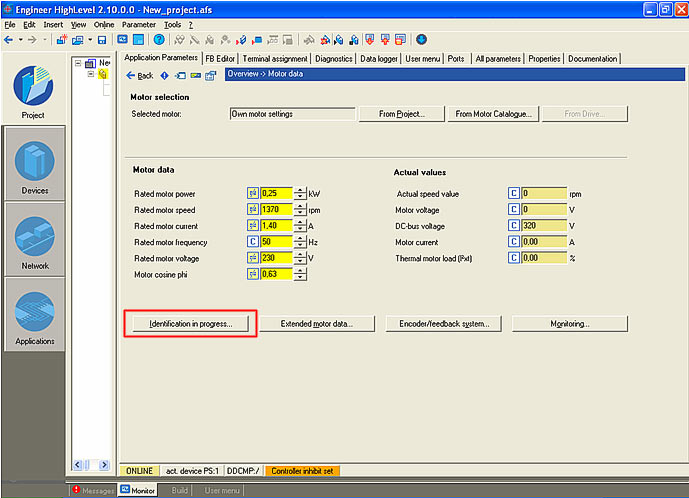
При работе с программным обеспечением L-Force Engineer нажимаем кнопку Identification in progress.
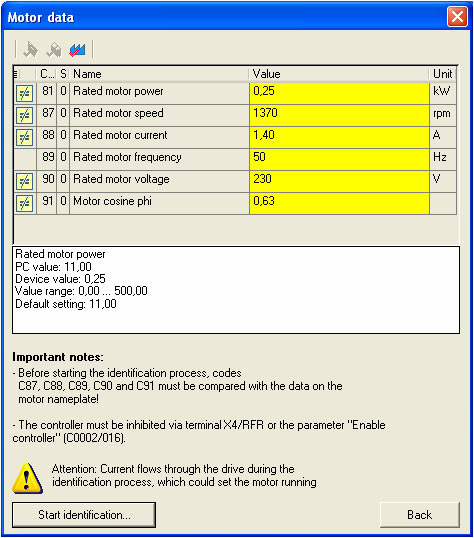
Далее идет запрос подтверждения данных двигателя и, если параметры двигателя введены правильно, нажимаем кнопку Start Identification.
Далее разблокируем преобразователь частоты, осуществляя подачу команды пуска на RFR (производится как при управлении с пульта, так и программировании с ПК).
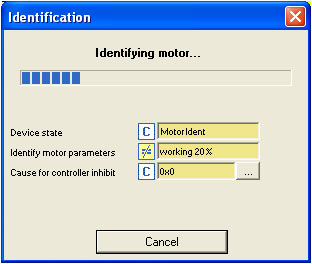
В течении примерно 40 секунд производится автокалибровка преобразователя на двигатель. При подключении преобразователя к программному обеспечению L-Force Engineer отображается состояние идентификации:
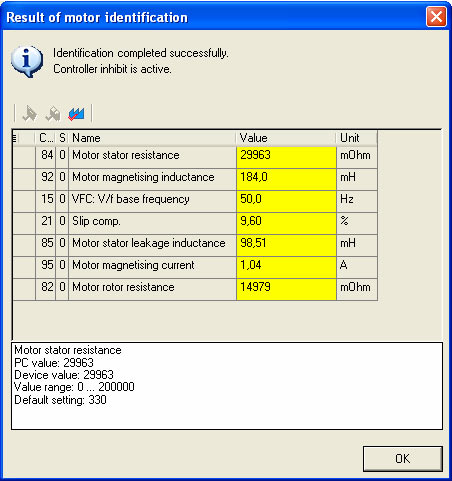
После окончания идентификации отображаются параметры сопротивления и индуктивности статора и ротора, определенные в процессе автонастройки. Значение параметра С0002/23 автоматически устанавливается равным нулю.
Настройка преобразователя частоты 8400 Inverter Drives для работы в моментном режиме
Настройку моментного режима производят с помощью программного обеспечения L-Force Engineer и устройства для конфигурирования преобразователей частоты 8400 Vector.
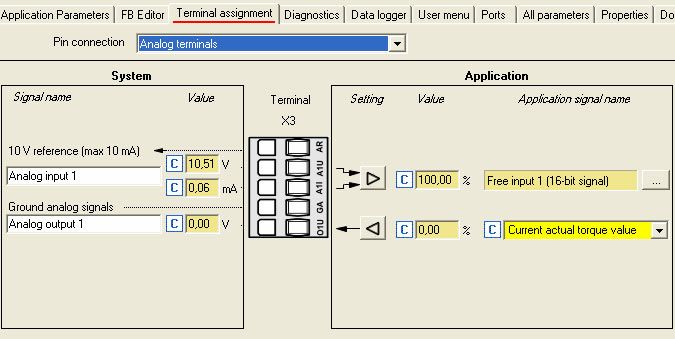
Вначале настраиваем аналоговый вход на формирование сигнала для свободно программируемого входа. Помимо этого настраиваем аналоговый выход по напряжению на индикацию текущего значения момента нагрузки.
Далее в FB Editor реализуем соответствующие переключения для реализации моментного режима с ограничением скорости. Вставляем системный блок LS_ParFree_b, предназначенный для формирования фиксированных дискретных сигналов. При этом в параметре bPar1 (первом фиксированном дискретном выходном сигнале) устанавливаем значение TRUE.
Данный выход привязывается ко входу блока LS_Motion_control_Kernel, отвечающего за режимы работы преобразователя частоты. При получении на входе bTorquemodeOn значения TRUE преобразователь частоты переходит в режим регулирования момента.
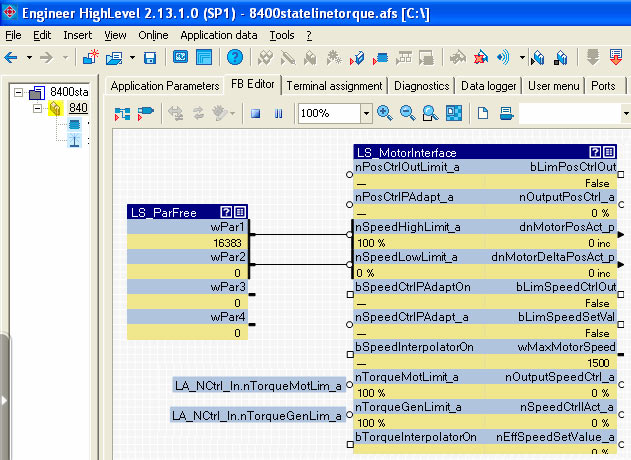
Далее это сигнал транслируется на вход блока L_Motor_Interface:
Сам системный блок L_Motor_Interface предназначен для управления преобразователем частоты в режиме функциональных блоков.
Аналогичным образом настраиваем аналоговый вход, с учетом особенности, что свободно программируемый вход 2, настроенный при программировании аналогового входа соответствует значению:
При этом следует помнить, что значению 100% задания по моменту соответствует число 16384.
Это же значение транслируется на вход блока LS_Motion_control_Kernel.
Далее задается сигнал ограничения на частоту вращения двигателя при нагрузке меньше номинальной. Для этого в FB Editor добавляется системный блок формирования аналоговых сигналов LS_ParFree. В параметрах wPar1 и wPar2 устанавливаем значения, соответствующие минимальному и максимальному ограничениям по скорости.
Далее переводим преобразователь частоты в режим векторного управления и осуществляем процедуру автоматической настройки преобразователя частоты на двигатель:
Процедура автонастройки описана в предыдущем вопросе этого раздела.
Включение ПИД - регулятора технологического процесса для преобразователя частоты 8400 Vector Highline
Одним из преимуществ преобразователя частоты 8400 Vector Highline по сравнению со Stateline является наличие второго аналогового входа. Это позволяет реализовать систему управления технологическим процессом (расходом, давлением и т.д.) с заданием величины задания от внешнего источника, например потенциометра. В случае использования 8400 Vector Stateline единственный аналоговый вход используется для подключения датчика процесса, следовательно, уставка технологического параметра задается при программировании преобразователя частоты с помощью модуля EZAEBK1001.
Построение контура ПИД - регулирования возможно как с помощью программного обеспечения L-force Engineer, так и с помощью модуля EZAEBK1001.
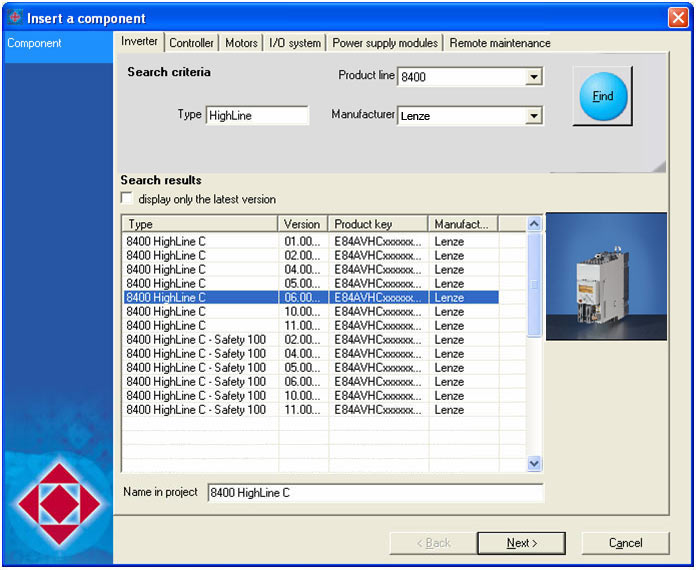
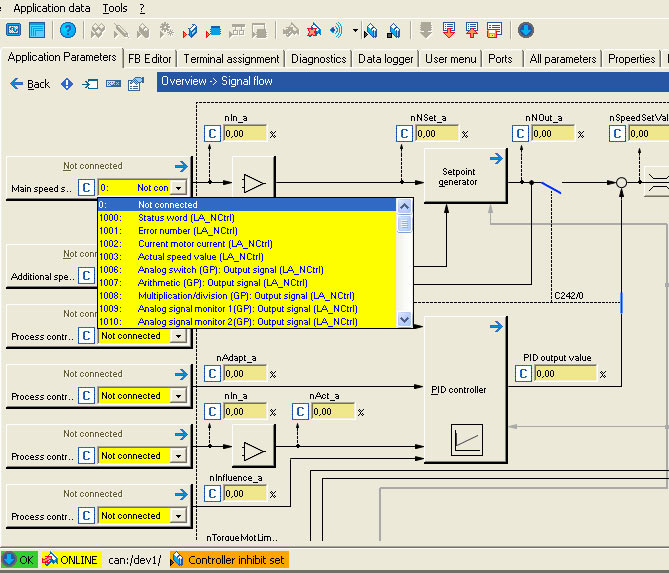
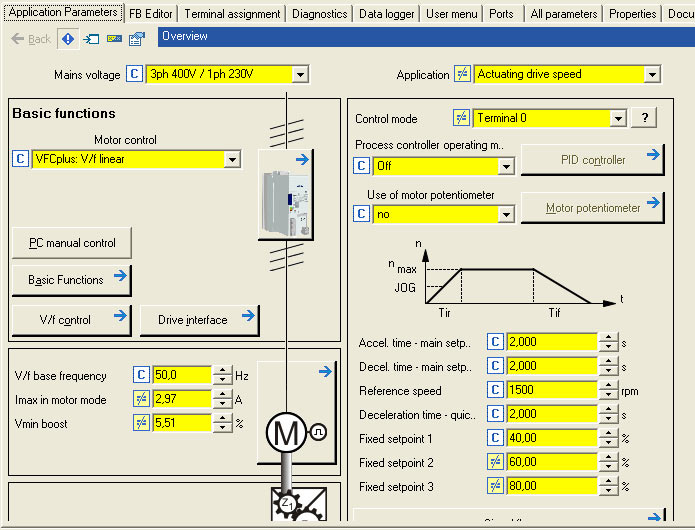
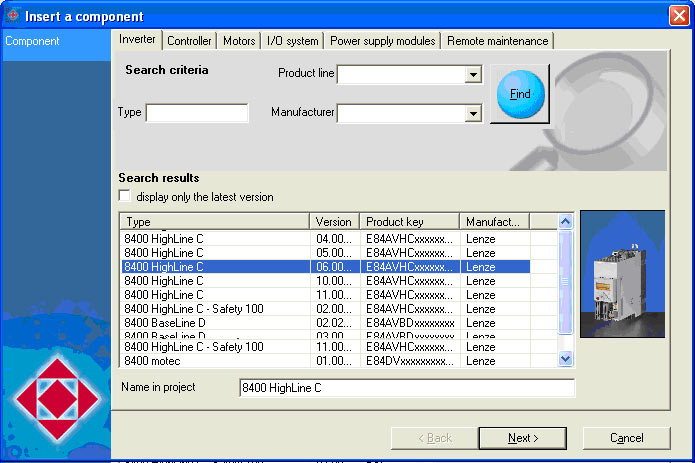
Программирование контура ПИД - регулирования с помощью программного обеспечения L-force Engineer. В окне ввода компонентов системы автоматизации выбираем используемый преобразователь частоты.
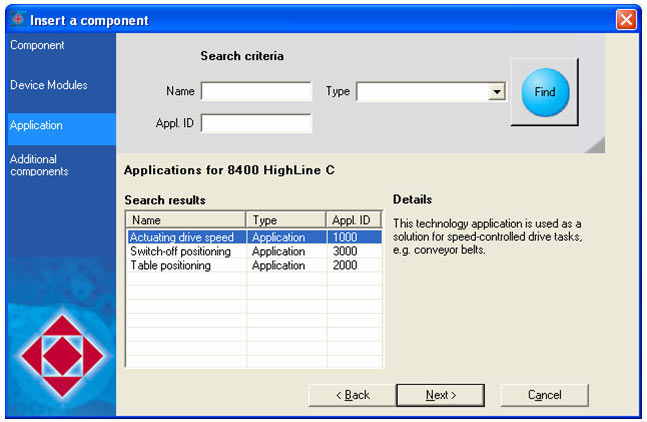
В окне выбора используемого применения преобразователя выбираем режим управления скоростью.
В окне настройки используемого применения включаем ПИД - регулятор технологического процесса.
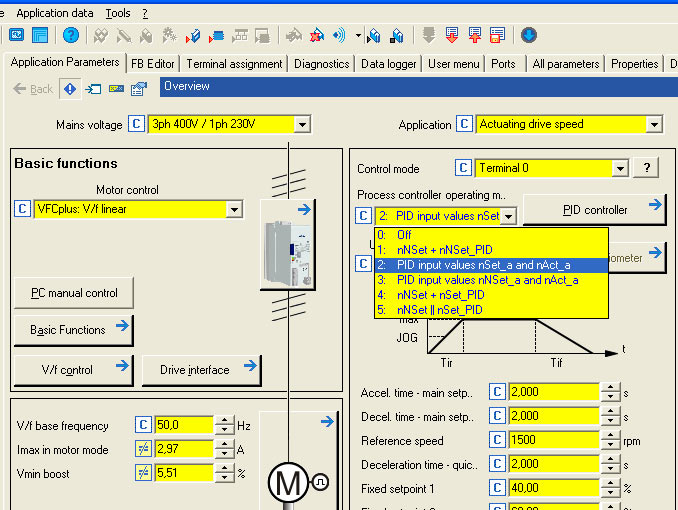
При включении режима ПИД - регулирования отключаем основную уставку по скорости двигателя.
Включаем на вход задания уставки для регулятора процесса значение с аналогового входа №1.
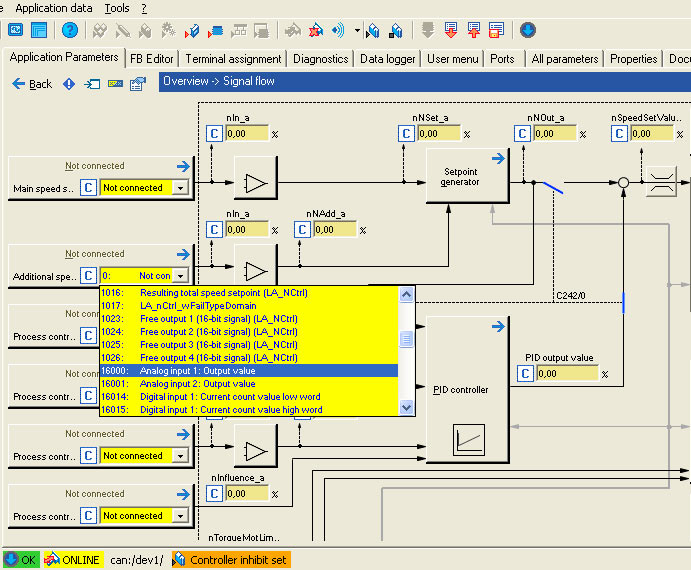
Значение действительного значения технологического параметра получаем с аналогового входа №2.
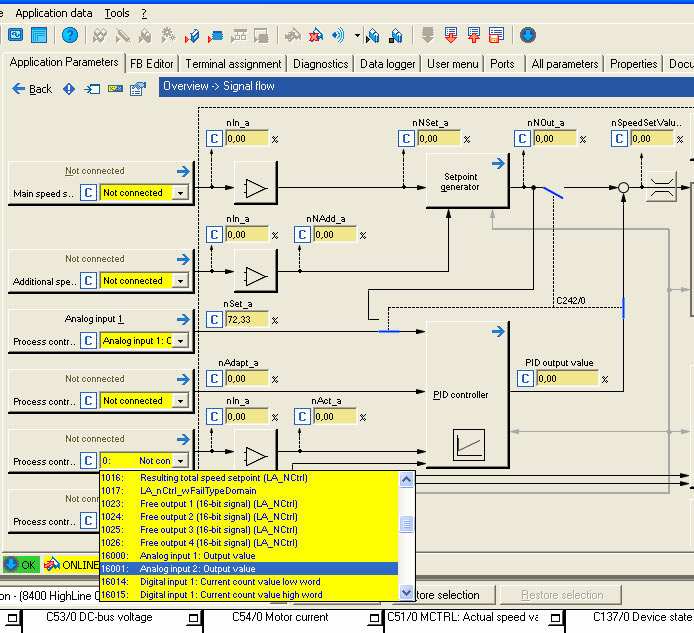
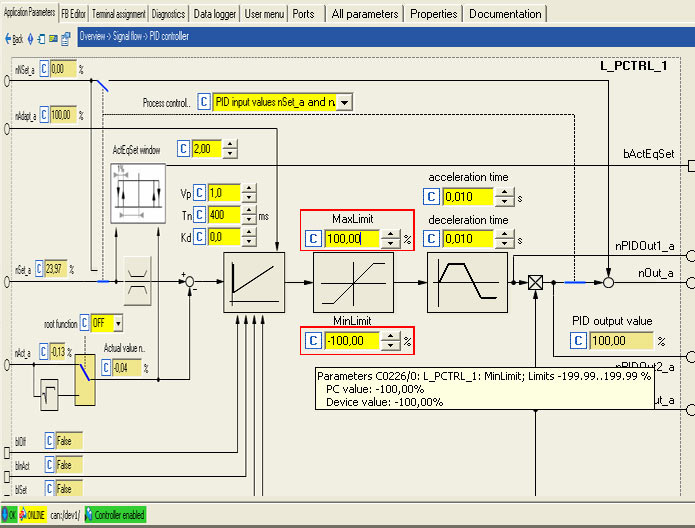
Влияние ПИД - регулятора в контуре регулирования устанавливаем равным 100%:
Параметры регулятора не должны меняться при изменении параметров системы, следовательно, влияние неадаптивной составляющей устанавливаем равной 100%.
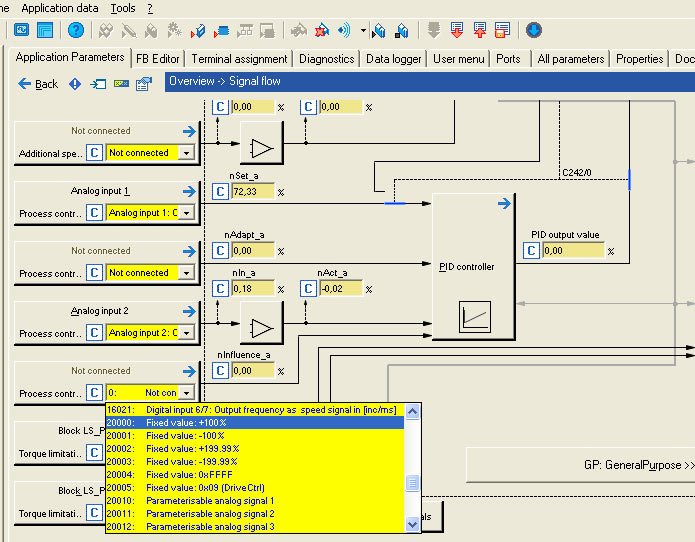
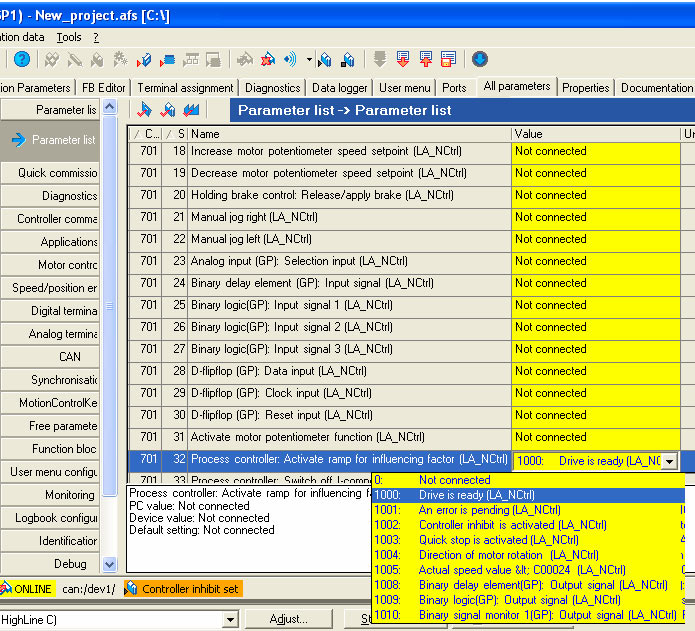
Далее включаем коэффициент влияния ПИД - регулятора. При этом влиение ПИД - регулятора равно заданному, при С0701/32=1000 (Привод в состоянии готовности). В случае появления ошибки работы преобразователя ПИД - регулятор отключается.
После ввода всех указанных параметров необходимо установить С0002/11=1 (сохранить все параметры в память преобразователя).
Ограничение скорости вращения двигателя при работе ПИД - регулятора устанавливается в параметрах С0225/0 и С0226/0.
Устанавливаем значение мощности привода равным 100%.
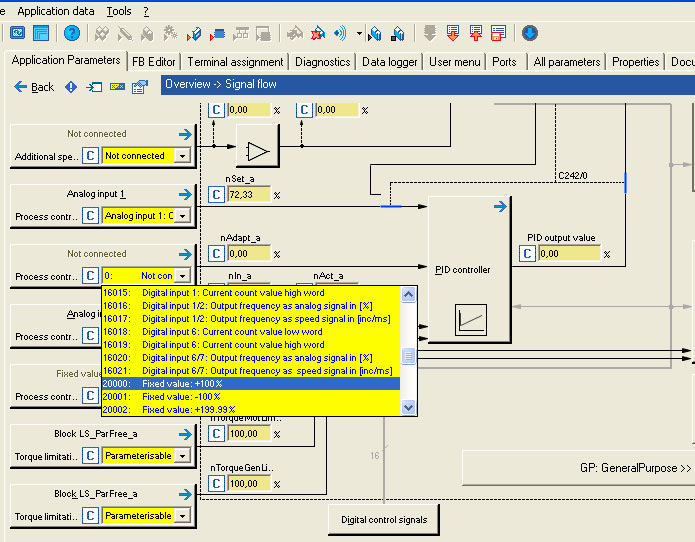
При программировании от модуля EZAEBK1001 необходимо ввести следующие параметры:
- С0242=2 (включен режим ПИД-регулятора)
- С0700/7=0 (задание по скорости не подсоединено)
- С0700/18=16000 (значение уставки определяется первым аналоговым входом)
- С0700/6=16001 (значение текущего значения технологического параметра)
- С0700/17=20000 (C_POS100_a, то есть значение 100% влияния ПИД - регулятора)
- С0700/5=20000 (C_POS100_a, то есть значение 100% неадаптивной составляющей)
- С00701/32=1 (включено влияние ПИД регулятора при готовности привода)
- С0225/0=100 (максимальная мощность при вращении в положительную сторону)
- С0226/0=100 (максимальная мощность при вращении в отрицательную сторону)
После ввода всех указанных параметров необходимо установить С0002/11=1 (сохранить все параметры в память преобразователя).
Настройка преобразователя частоты 8400 Vector Highline в серворежим с помощью пульта оператора EZAEBK1001
Описание процедуры настройки преобразователя частоты в режиме сервоуправления приведено для применения "Управление скоростью".
Сначала необходимо провести процедуру автоматической настройки преобразователя на двигатель согласно инструкции по эксплуатации.
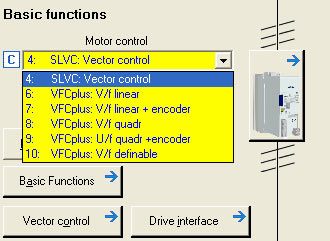
Далее переводим преобразователь частоты в серворежим, для чего устанавливаем С0006/0=2 (ASM Servo control).
Настраиваем обратную связь по скорости и положению. Если энкодер установлен на валу двигателя, то с него можно получать сигналы обратной связи как по скорости, так и по положению.
При подключении выводов А и В энкодера к клеммам DI1, DI2, необходимо установить параметры преобразователя в значения:
- С0495/0=1 (обратная связь по скорости - частотный сигнал энкодера на входах DI1, DI2)
- C0490/0=1 (обратная связь по положению - частотный сигнал энкодера на входах DI1, DI2)
- С0420/1=хххх (разрядность подключенного энкодера, количество импульсов/оборот)
- С0115/1=2 (на входы DI1, DI2 подаются частотные сигналы, сдвинутые относительно друг друга на 90 градусов для определения направления вращения)
А если выводы А и В энкодера подключены к клеммам DI6, DI7, то устанавливаем параметры преобразователя в значения:
- С0495/0=2 (обратная связь по скорости - частотный сигнал энкодера на входах DI6, DI7)
- C0490/0=2 (обратная связь по положению - частотный сигнал энкодера на входах DI6, DI7)
- С0420/2=хххх (разрядность подключенного энкодера, количество импульсов/оборот)
- С0115/2=2 (на входы DI6, DI7 подаются частотные сигналы, сдвинутые относительно друг друга на 90 градусов для определения направления вращения)
Далее следует подать команду на запуск преобразователя частоты. Если при подаче сигнала по скорости двигатель уходит вразнос либо, происходит отключение преобразователя с ошибкой SD3, то необходимо поменять местами провода энкодера на частотных входах DI1 / DI2 (DI6 / DI7).
Для высокоточной отработки задания по скорости необходимо адаптировать параметры регуляторов скорости и положения к приводному механизму.
Следует помнить !
Вначале производится настройка параметров ПИД - регулятора контура скорости, а затем параметров П - регулятора положения.
- С0070/2 (коэффициент усиления ПИД - регулятора скорости);
- С0071/2 (постоянная интегрирования ПИД - регулятора скорости);
- С0072/0 (постоянная дифференцирования ПИД - регулятора скорости);
- С0254/0 (коэффициент усиления П - регулятора положения).
По окончанию программирования устанавливаем:
- С0002/11=1 (записать измененные параметры в память преобразователя).

В качестве примера показано подключение энкодера Autonics серии Е40 с выходом 3-Т-24.
На схеме не показан способ формирования задания по скорости. Он может быть реализован как дискретное управление, управление по аналоговому входу, управление по сети. С помощью переключателя SA1 подается разрешение работы преобразователя. Вместо дискретных входов DI1, DI2 выходы энкодера могут быть подключены к клеммам DI6, DI7.
Программирование преобразователя частоты под задачу "Позиционирование по концевым выключателям с 8400 Stateline"
|
Запускаем программное обеспечение L-force Engineer и осуществляем подключение преобразователя частоты 8400 Vector Stateline с помощью Diagnostic Adapter либо преобразователя USB/CAN EMF2177IB. При этом на экране ПК отображается основное окно настройки применения: |
Переводим преобразователь в режим "Switch-off positioning":
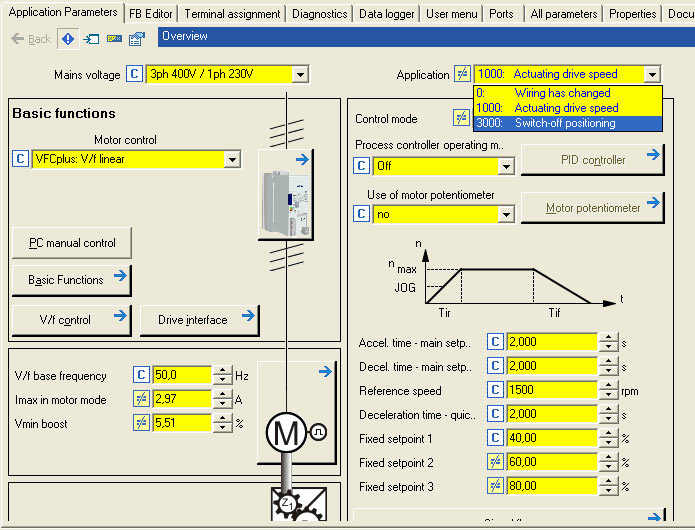
При программировании с пульта EZAEBK1001 устанавливаем:
С0005/0=3000
Далее выбираем режим управления с помощью дискретных и аналоговых входов "Terminal 2".
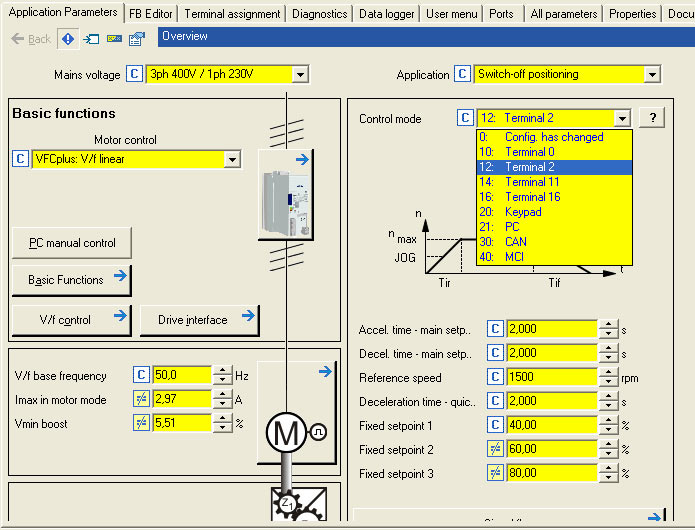
При программировании с пульта EZAEBK1001 устанавливаем:
С0007/0=12.
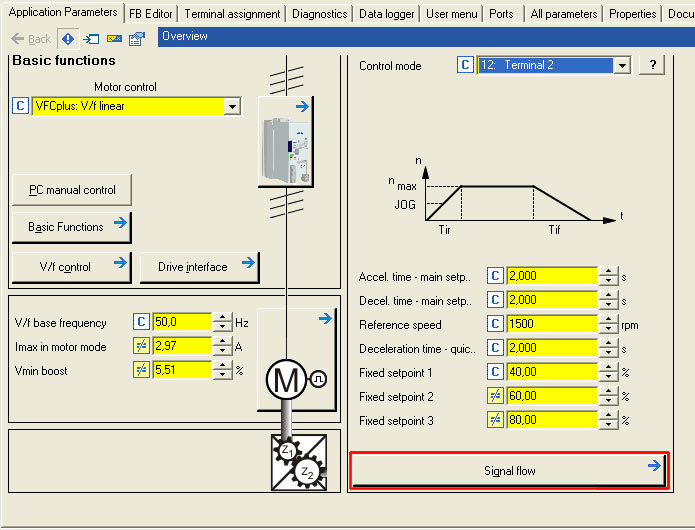
Далее входим в блок программирования логики прохождения сигналов "Signal Flow":
Устанавливаем фиксированные значения высокой и низкой скоростей движения. В данном примере рабочая скорость составляет 100% от номинальной, а скорость дотягивания -20% от номинальной.
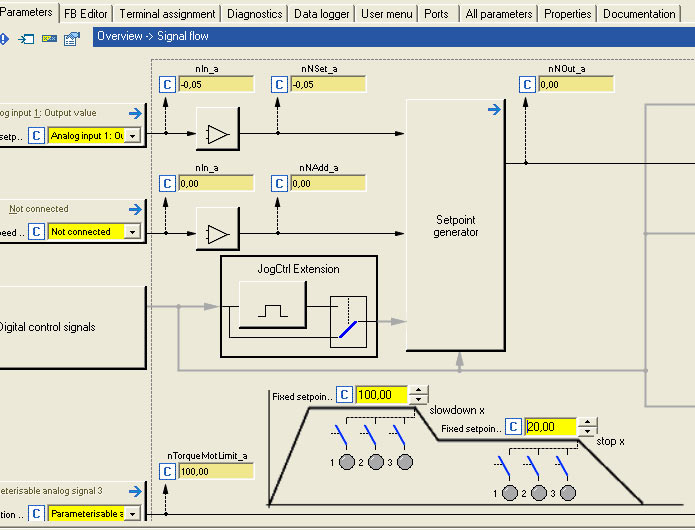
При программировании с пульта EZAEBK1001 устанавливаем:
С0039/2=20;
С0039/3=100.
Далее конфигурируем влияние сигнала срабатывания для перехода в режимы замедления и останова. Для этого в блоке JogCtrlExtention для сигналов InputSens.Slowdown1 и InputSens.Stop выбираем срабатывание по фронту.
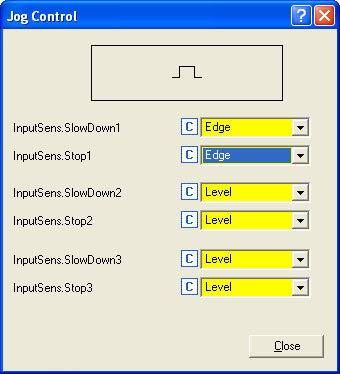
При программировании с пульта EZAEBK1001 устанавливаем:
С0488/1=1;
С0488/2=1.
В блоке Digital Control Signal назначаем влияние дискретных входов следующим образом:
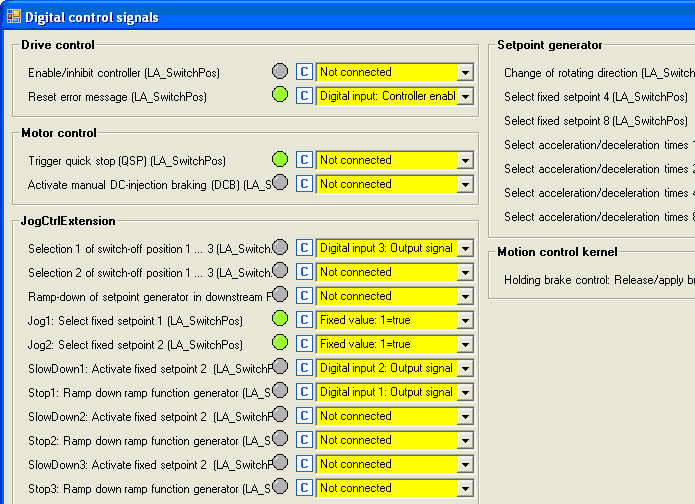
При программировании с пульта EZAEBK1001 устанавливаем:
С0761/10=0 (отключаем влияние дискретного входа №4);
С0761/14=16001 (замедление по срабатыванию дискретного входа №2);
С0761/16=0 (отключаем замедление по второму профилю при срабатывании дискретного входа №2).
По окончанию программирования сохраняем измененные параметры в память преобразователя.
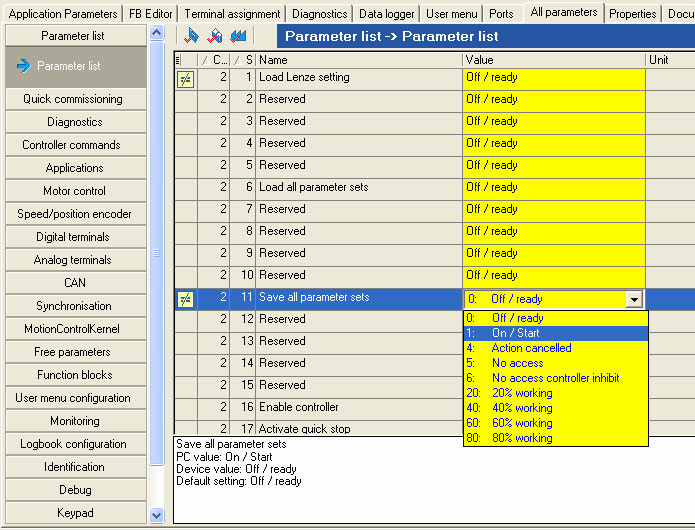
При программировании с пульта EZAEBK1001 устанавливаем:
С0002/11=1 (Сохранить все группы параметров).
Последовательность работы схемы.
- При подаче разрешения работы и логической единицы на DI3 преобразователя, двигатель начинает вращение на максимальной скорости.
- При срабатывании датчика, подключенного к DI2 скорость вращения снижается до 20%, причем при отпускании DI2 скорость остается на уровне 20%.
- При срабатывании датчика DI1 система останавливается, причем при отпускании DI1 скорость по-прежнему равна нулю.
- Для повторного запуска цикла уровень на входе DI3 устанавливается нулевым, а затем снова переводится в единицы.
Задача управления преобразователем частоты электропривода экструдера, работающего в режиме позиционирования без обратной связи.
|
В примере представлена процедура программирования преобразователя частоты экструдера без датчика обратной связи по положению. Задача позиционирования без обратной связи решается за счет применения преобразователей частоты серии 8400 Vector Highline. При конфигурировании преобразователя с помощью программного обеспечения L-force Engineer устанавливаем: |
Для решения задачи позиционирования настраиваем преобразователь частоты в режим "Table Positioning".
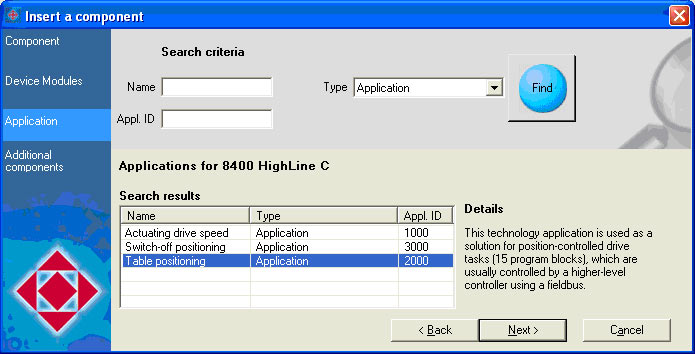
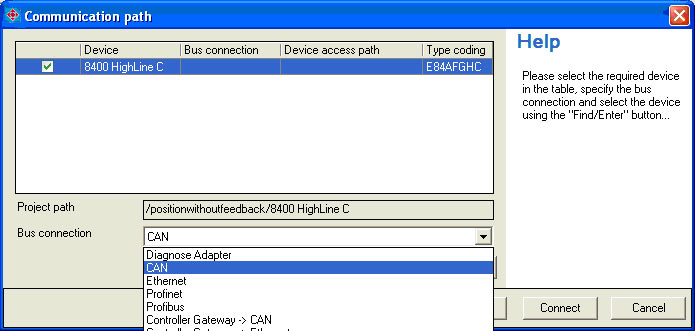
Далее подключаем преобразователь частоты к ПК с помощью Diagnostic Adapter либо USB/CAN преобразователя:
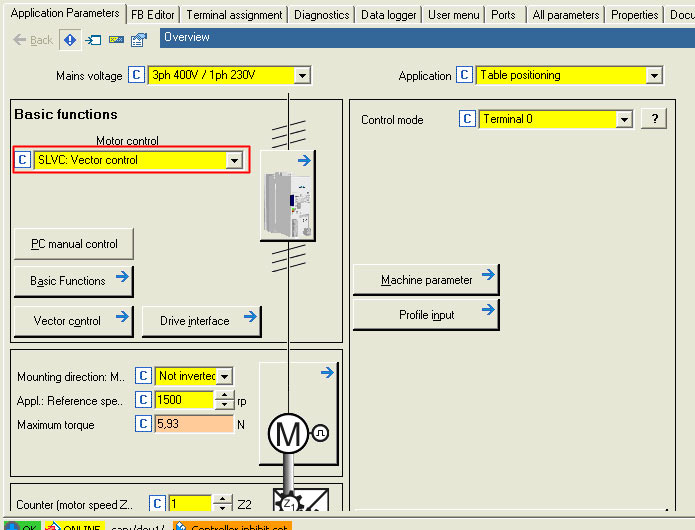
Для более точного позиционирования переводим преобразователь частоты в векторный режим управления и осуществляем процедуру автоматической настройки преобразователя на двигатель (описано ранее).
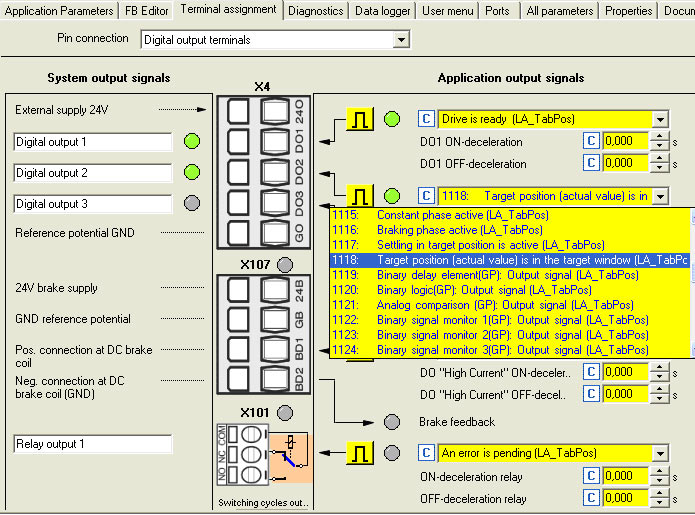
Далее во вкладке Terminal assignment настраиваем дискретные входы и выходы преобразователя.
Один из возможных вариантов конфигурации выглядит следующим образом:
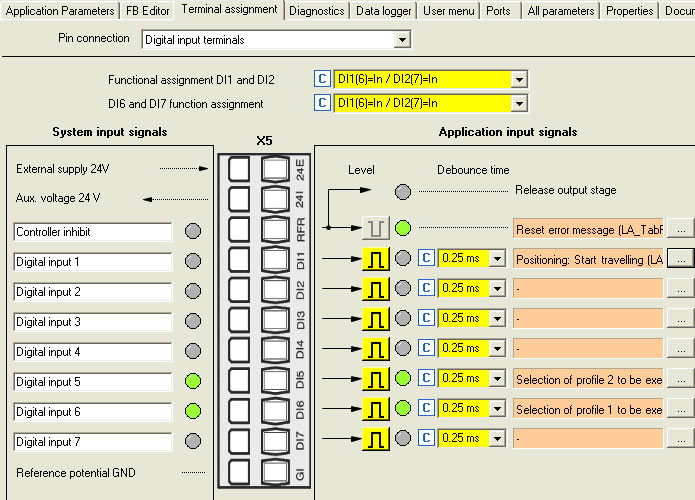
Для реализации процедуры табличного позиционирования необходимо перейти в профиль №3 (устанавливаем перемычки между клеммами 24I и DI5, DI6). Запуск преобразователя для отработки соответствующего профиля осуществляется подачей сигнала на вход DI1.
Параметры профиля настраиваются в меню Profile Input. Для профиля №3 устанавливаем относительное перемещение с соответствующими параметрами:
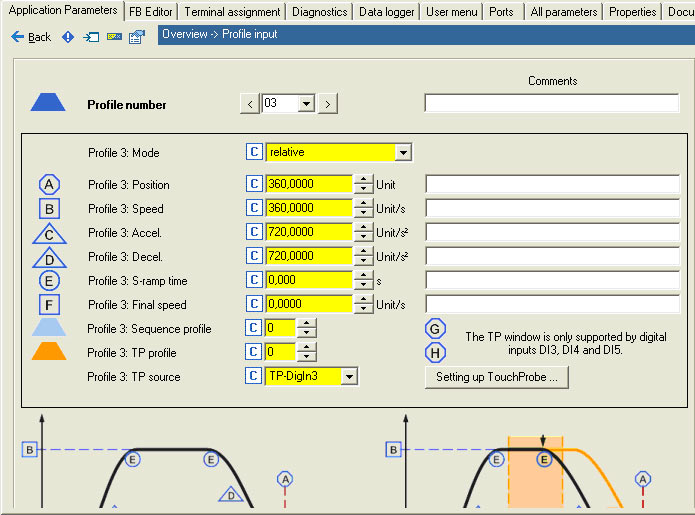
По замыканию концевого выключателя, подающего сигнал DI1, начинается выполнение профиля №3.
По окончанию отработки профиля выдается сигнал, сообщающий о том, что позиционирование закончено. Этот сигнал может выдаваться с помощью одного из дискретных выходов. Наиболее подходящей для данного применения является выдача дискретного сигнала при приходе текущего значения по положению в заданное окно задания по положению.
Аналогичным образом может быть настроен преобразователь частоты электропривода конвейера, перемещающего сосуды.
Сборник формул и определений приводной техники
 Сборник формул Lenze [596пїЅпїЅ]
Сборник формул Lenze [596пїЅпїЅ]

СВ Альтера © 2026 | Адреса: 03124, м. Київ, б-р Вацлава Гавела, 4 | Телефони: (+38044) 496-18-88, 241-90-84 | Факс: (+38044) 496-18-18 | E-mail: office@sv-altera.com Designed by jDtnt© / KV©

