Запускаем программное обеспечение L-force Engineer и осуществляем подключение преобразователя
частоты 8400 Vector Stateline с помощью Diagnostic Adapter либо преобразователя USB/CAN EMF2177IB.
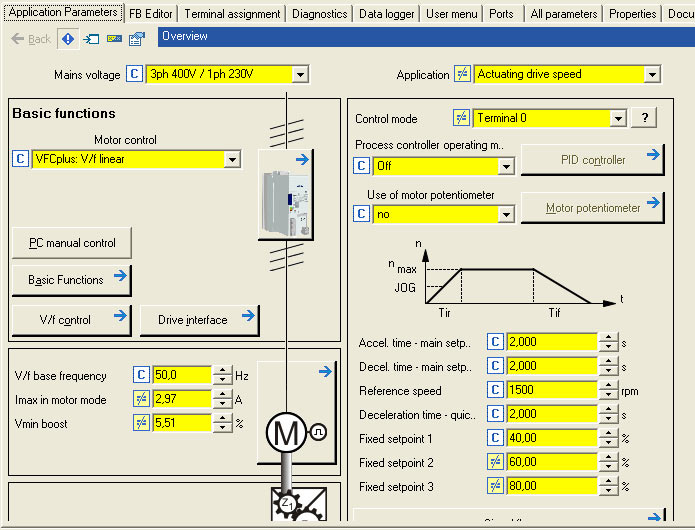
При этом на экране ПК отображается основное окно настройки применения:
Переводим преобразователь в режим "Switch-off positioning":
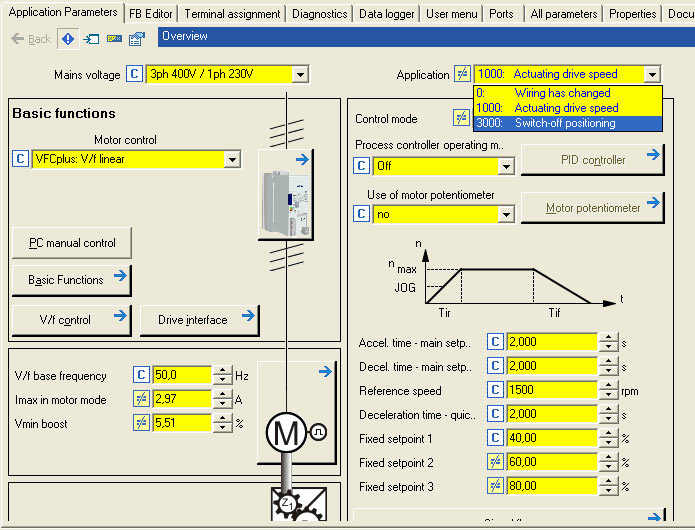
При программировании с пульта EZAEBK1001 устанавливаем:
С0005/0=3000
Далее выбираем режим управления с помощью дискретных и аналоговых входов "Terminal 2".
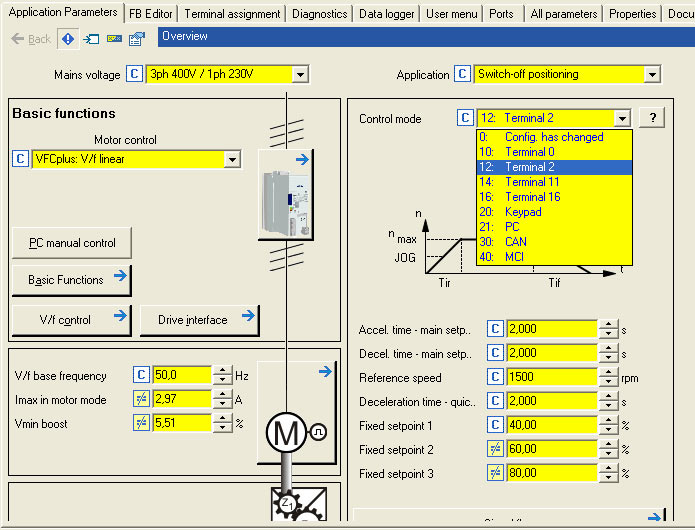
При программировании с пульта EZAEBK1001 устанавливаем:
С0007/0=12.
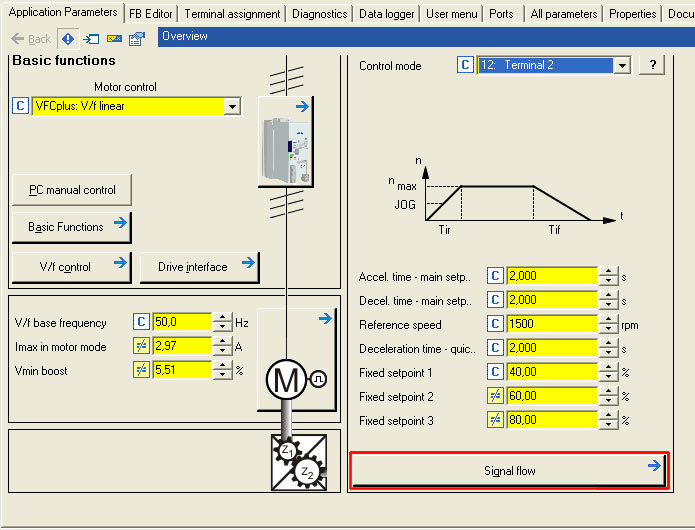
Далее входим в блок программирования логики прохождения сигналов "Signal Flow":
Устанавливаем фиксированные значения высокой и низкой скоростей движения. В данном примере рабочая
скорость составляет 100% от номинальной, а скорость дотягивания -20% от номинальной.
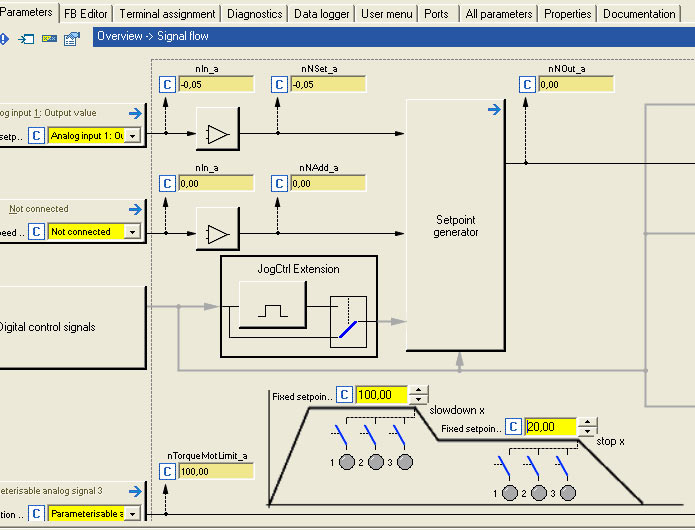
При программировании с пульта EZAEBK1001 устанавливаем:
С0039/2=20;
С0039/3=100.
Далее конфигурируем влияние сигнала срабатывания для перехода в режимы замедления и останова.
Для этого в блоке JogCtrlExtention для сигналов InputSens.Slowdown1 и InputSens.Stop выбираем срабатывание по фронту.
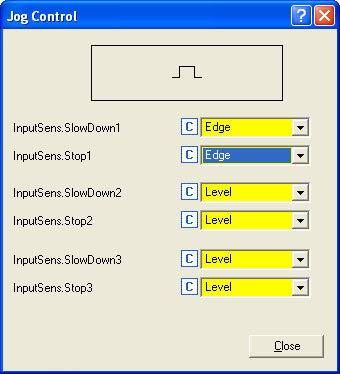
При программировании с пульта EZAEBK1001 устанавливаем:
С0488/1=1;
С0488/2=1.
В блоке Digital Control Signal назначаем влияние дискретных входов следующим образом:
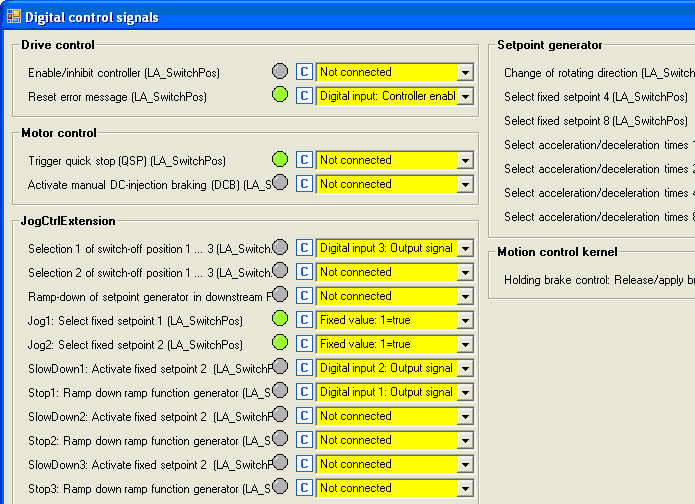
При программировании с пульта EZAEBK1001 устанавливаем:
С0761/10=0 (отключаем влияние дискретного входа №4);
С0761/14=16001 (замедление по срабатыванию дискретного входа №2);
С0761/16=0 (отключаем замедление по второму профилю при срабатывании дискретного входа №2).
По окончанию программирования сохраняем измененные параметры в память преобразователя.
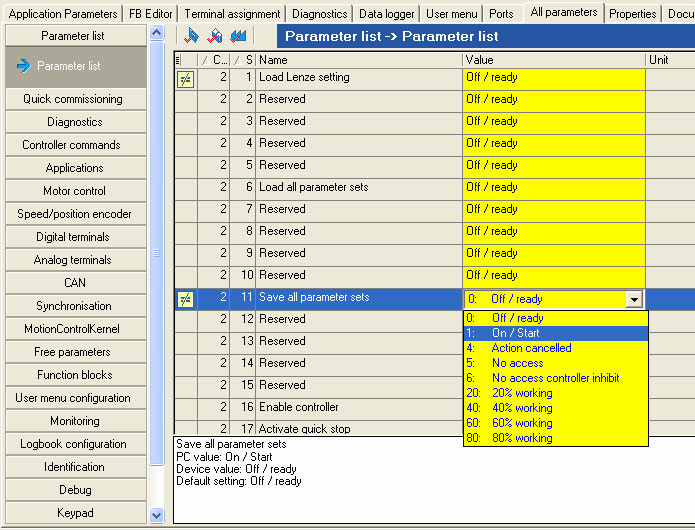
При программировании с пульта EZAEBK1001 устанавливаем:
С0002/11=1 (Сохранить все группы параметров).
Последовательность работы схемы.
- При подаче разрешения работы и логической единицы на DI3 преобразователя, двигатель начинает вращение на максимальной скорости.
- При срабатывании датчика, подключенного к DI2 скорость вращения снижается до 20%, причем при отпускании DI2 скорость остается на уровне 20%.
- При срабатывании датчика DI1 система останавливается, причем при отпускании DI1 скорость по-прежнему равна нулю.
- Для повторного запуска цикла уровень на входе DI3 устанавливается нулевым, а затем снова переводится в единицы.


