ТОВ "СВ АЛЬТЕРА" ексклюзивний представник
Lenze в Україні
Lenze в Україні
044 496-18-88 / 044 496-18-18
office@sv-altera.com
office@sv-altera.com
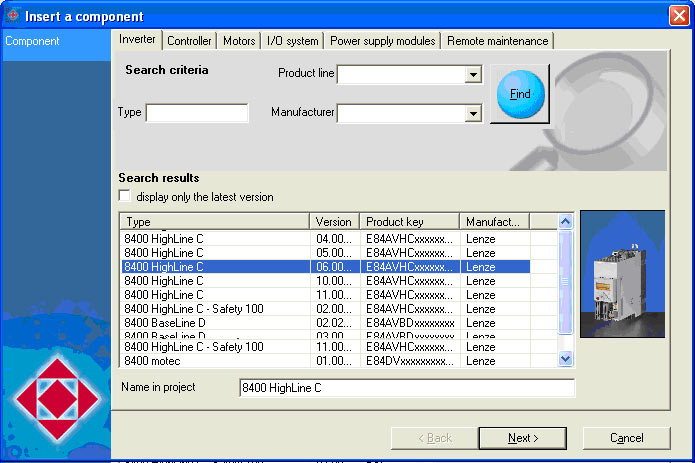
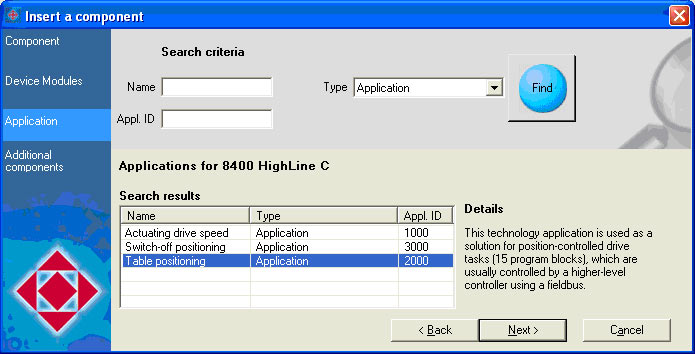
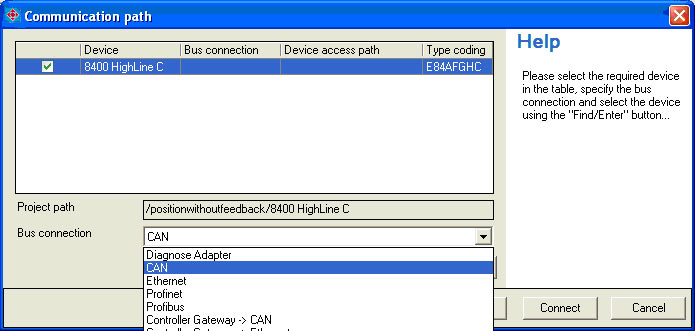
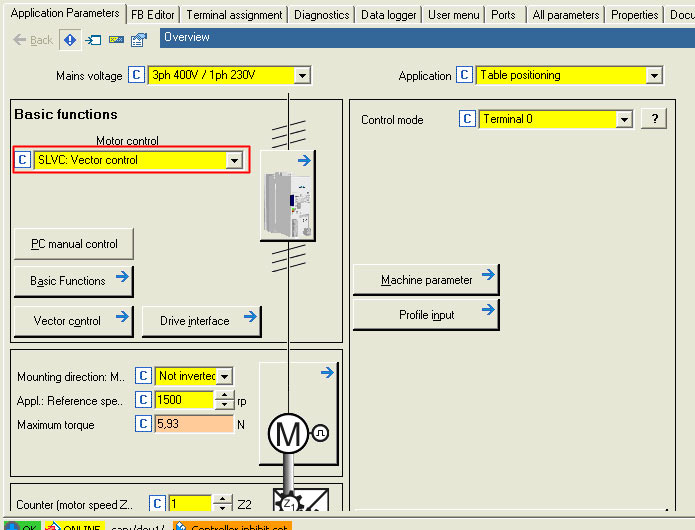
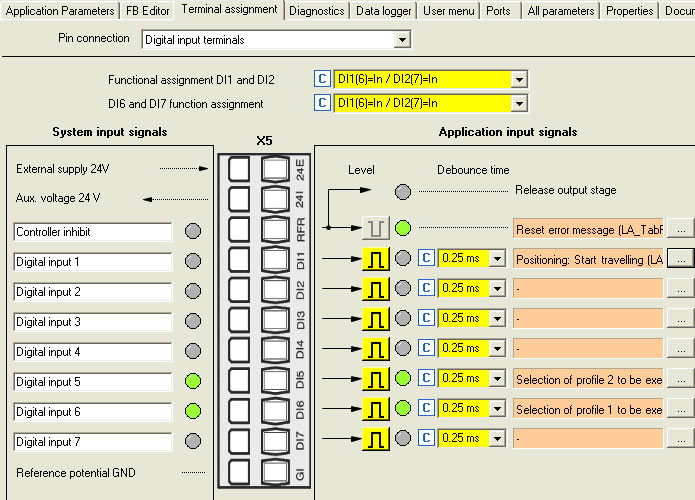
Поточечное позиционирование без обратной связи с 8400 High Line
Основные функции:
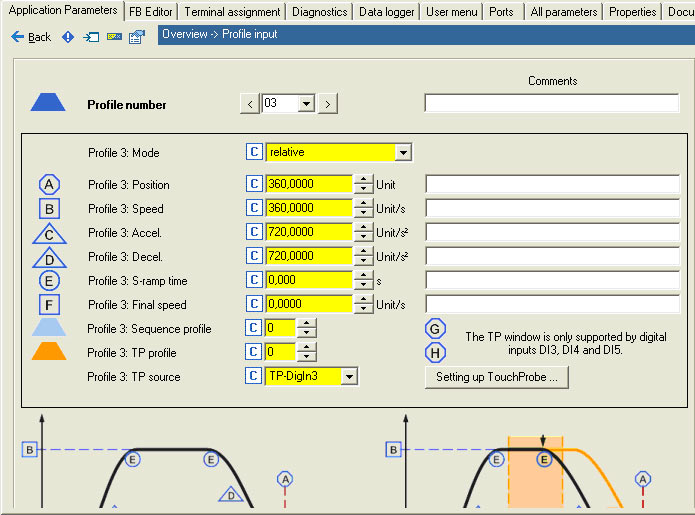
- Относительное и абсолютное позиционирование
- 15 свободно программируемых положений
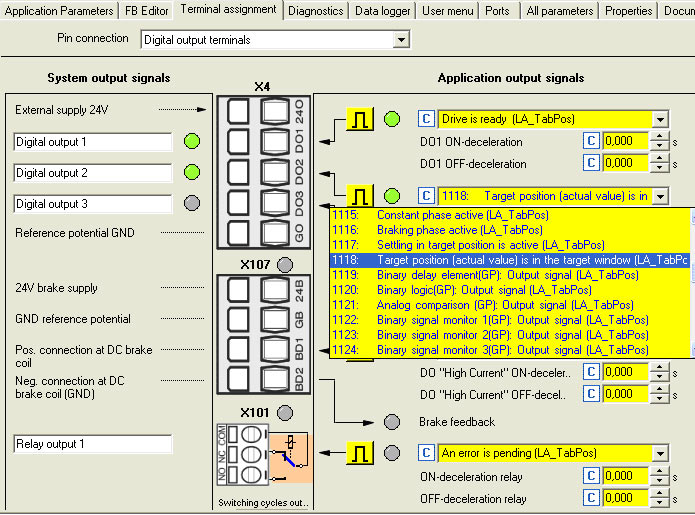
- Мониторинг ошибок привода
- Функция ручной корекции
- Возврат в исходное положение на лету
- Контроль автоматического удержания тормоза
- Быстрый останов (QSP) с настраиваемой интенсивностью
- Регулируемое ограничение момента
- Регулируемое ограничение рывка при разгоне/замедлении(S-ramp)
- Длительное перемещение (режим управления скорости)
- Работа с асинхронными электродвигателями без обратной связи (энкодер)
Может быть достигнуто до 60 циклов в минуту. Типичные применения включают: дозирующие автоматы, укладчики, питающие аппараты ...
Задача управления преобразователем частоты электропривода экструдера, работающего в режиме позиционирования без обратной связи.

СВ Альтера © 2026 | Адреса: 03124, м. Київ, б-р Вацлава Гавела, 4 | Телефони: (+38044) 496-18-88, 241-90-84 | Факс: (+38044) 496-18-18 | E-mail: office@sv-altera.com Designed by jDtnt© / KV©

